2. Disseny¶
El disseny de l’R2B2-nano és completament parametritzable i es pot adaptar ràpidament a les necessitats o dispositius de que es disponin tan sols canviant pocs paràmetres.
A continuació explicarem com treballar amb el disseny i quins són els paràmetres que afecten a cada part del disseny.
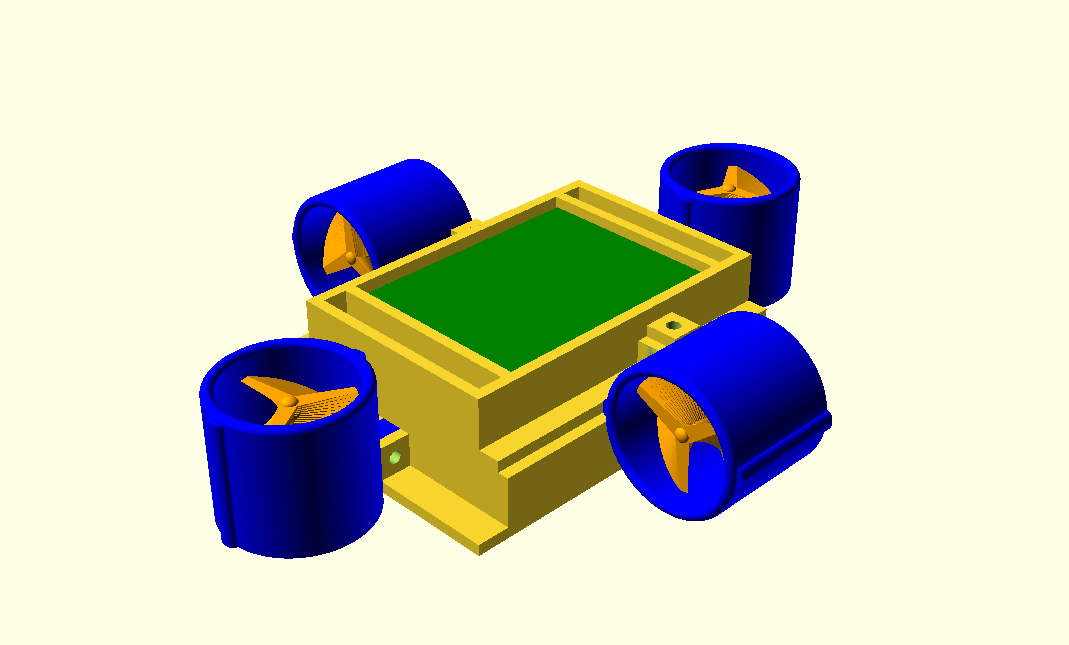
R2B2-nano 3D (r2b2-nano.scad).
2.1. OpenSCAD¶
El disseny de l’R2B2-nano està realitzat 100% en OpenSCAD.
OpenSCAD és una aplicació lliure per crear objectes sòlids de CAD. No és un editor interactiu sino un compilador 3D basat en un llenguatge de descripció textual. Un document d’OpenSCAD específica primitives geomètriques i defineix com son modificades i manipulades per reproduir un model 3D.
Que l’OpenSCAD sigui un llenguatge ens permet per una banda parametritzar tots els objectes de forma molt senzilla i per altra banda ens permet col·laborar d’una manera molt més àgil, ja que la modificació d’un objecte queda reflexada en quina línia de codi s’ha modificat, no en tot un fitxer binari o d’aplicació.
És molt util tindre l”OpenSCAD CheatSheet a mà cada cop que volem fer algun disseny o modificació.
2.2. Configuració¶
Tots els paràmetres es troben al fitxer config.scad de la carpeta design. Podem definir l’amplada de les parets de tot el 3D, les mides del motors, dels propulsors, la mida dels cargols, etc… i cada paràmetre que ajustem fa que tot el disseny s’hi adapti, així de forma ràpida i sense haver de redibuixar tot el 3D disposem de les peces idònies al nostre muntatge.
A més a més dels paràmetres que especifiquen les mides del disseny hi ha el paràmetre $fn que defineix en número de fragments en que es renderitzaran les circumferències completes. Com més gran sigui el valor de $fn més tardarà a fer el renderitzat. No és recomanable un valor superior a 100.
/*
Title: config.scad for R2B2 Nano
Description: All configuration parameters for R2B2-Nano
Authors: Pau Roura (@proura)
Date: 20180721
Version: 0.2
Notes:
*/
//General Config
$fn = 100;
w_walls=2.7; //width of the walls
d_screw_h=3; //screw thread hole diameter
d_screw_head=6.5; //screw head diameter
d_screw_p=d_screw_h+0.4; //screw pass trhougth diameter
h_support=8; //screw support height
w_support=8; //screw support width
w_chassis=70; //chassis width
d_chassis=100; //chassis depth
h_battery=12; //battery height
h_control=12; //electronics height
//motor
d_motor=7.6; //motor diameter
d_motor_shaft=1.5; //motor shaft diameter
h_motor=16.60; //motor height
//motor_housing
w_walls_m=1; //width of the walls
gap_housing=3; //extra height of the encapsulation
h_motor_body=h_motor+(gap_housing*2); //motor housing height
//Thrusters
d_motor_t=d_motor+(w_walls_m*2); //motor support diameter
h_motor_sup=8; //motor support height
o_motor=0; //motor support distance from ground
d_thruster=34; //thruster diameter
h_thruster=30; //thruster height
//module propeller
h_propeller=10; //propeller height
o_propeller=1; //offset of the blades to shaft
n_blade=3; //number of blades
s_blade=20; //angle separation between blades
w_blade=4; //width of the blades
rounded="empty"; //shape of the blades [round | trian | empty]
d_motor_grub=2; //motor grub screw diameter
Fitxer config.scad.
2.3. Parts¶
2.3.1. Base de càrrega¶
La base de càrrega és on hi van les dues bobines transmisores capaces de generar el camp magnètic que un cop connectada amb els USBs a la corrent i posem l’R2B2-nano a sobre ens carregarà les bateries.
La base de càrrega tan sols utilitza com a paràmetres les mides del cargols que volem fer servir. Per tant tan sols comprovarem els següents paràmetres a la configuració:
/*
Title: config.scad for R2B2 Nano
*/
d_screw_h=3, //screw hole diameter
d_screw_p=d_screw_h+0.4 //screw pass trhougth diameter
d_screw_head=6.5 //screw head diameter
| Paràmetre | Valor per defecte | Descripció |
|---|---|---|
| d_screw_h | 3 mm | Diàmetre de la tija del cargol on ha de collar |
| d_screw_p | d_screw_h+0.4 mm | Diàmetre on ha de passar el cargol sense collar |
| d_screw_head | 6.5 mm | Diàmetre del cap del cargol |

Base de càrrega (base.scad).
2.3.2. Xassís¶
El xassís de l’R2B2-nano està format per dues parts. Una on hi ha tot el sistema d’alimentació (bobines receptores de corrent, controladors de càrrega per les bateries, les bateries i el regulador de voltatge) i l’altre on hi ha tota l’electrònica de control (Microcontrolador, el giroscopi/acceleròmetre, drivers de motors, etc…).
S’ha fet un disseny modular separant l’alimentació del control a proposìt, ja que per a aconseguir impermeabilitzar tota l’electrònica s’omplen els xassís de resina de polièster, que un cop endurida fa que no es pugui accedir a modificar el contingut. El fet de tenir els dos mòduls separats fa que podem reaprofitar-los en cas de voler fer modificacions en alguna de les parts.
Els principals paràmetres que cal tenir en compte a l’hora de configurar el xassís és l’amplada, la llargada i la profunditat dels dos mòduls per tal d’assegurar-nos que quan fem el bany de resina de polièster l’electrònica quedi totalment coberta.
/*
Title: config.scad for R2B2 Nano
*/
d_screw_h=3, //screw hole diameter
w_walls=2.7, //wall width
w_support=8, //support width
h_support=8, //support depth
w_chassis=70, //chassis width
d_chassis=100, //chassis depth
h_battery=12, //chassis power height
h_control=12 //chassis control height
| Paràmetre | Valor per defecte | Descripció |
|---|---|---|
| d_screw_h | 3 mm | Diàmetre de la tija del cargol on ha de collar |
| w_walls | 2.7 mm | Amplada de les parets |
| w_support | 8 mm | Amplada dels suports del propulsors |
| h_support | 8 mm | Profunditat dels suports del propulsors |
| w_chassis | 70 mm | Amplada del xassís |
| d_chassis | 100 mm | Profunditat del xassís |
| h_battery | 12 mm | Alçada de la zona d’electrònica d’alimentació |
| h_control | 12 mm | Alçada de la zona d’electrònica de control |
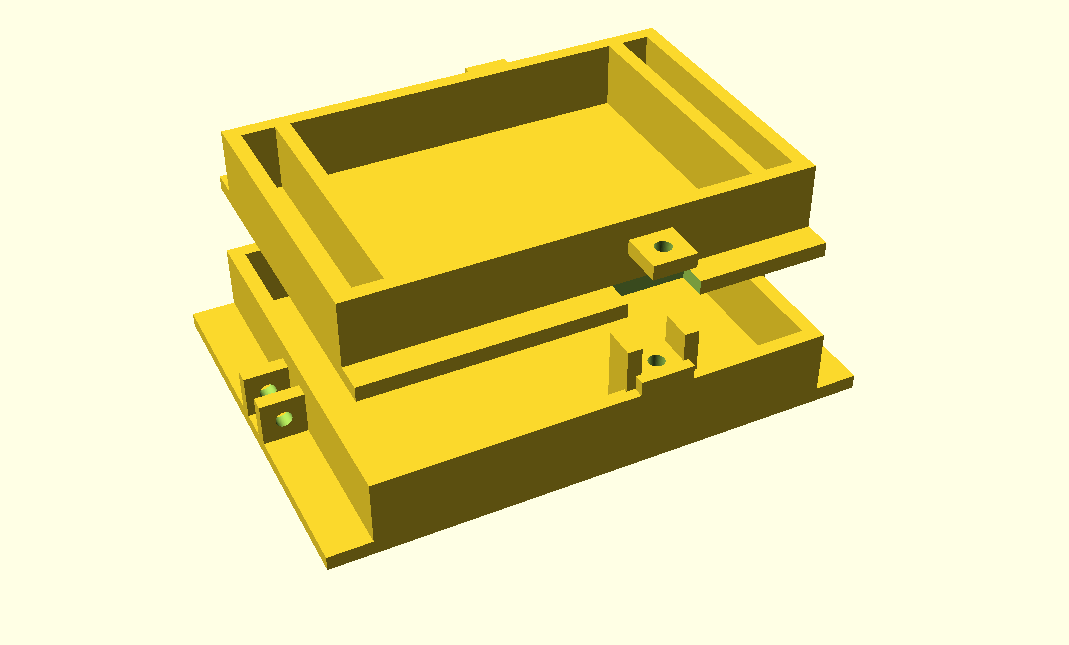
Xassís d’alimentació i control (chassis.scad).
L’R2B2-nano es programa a través de Wifi (OTA / Over-the-air programming), però pot ser que algun cop ens trobrem amb problemes, es carregui un firmware erròni i no ens permeti la programació a través de wifi.
Per això és important deixar un port sèrie disponible per poder accedir a programar l’ESP32 amb conversor USB to tty. Aquest port sèrie es compon de 5 cables i mentre no es fan servir cal que estiguin protegits per no crear curtcircuits. Els cables que componen el port es col·loquen dins el protector del port i es farceix de vaselina per que no hi pugui entrar l’aigua.
L’únic paràmtre que hem de tenir en compte és la mida del cargols que farem servir per collar el protector.
/*
Title: config.scad for R2B2 Nano
*/
d_screw_h=3 //screw hole diameter
| Paràmetre | Valor per defecte | Descripció |
|---|---|---|
| d_screw_h | 3 mm | Diàmetre de la tija del cargol on ha de collar |
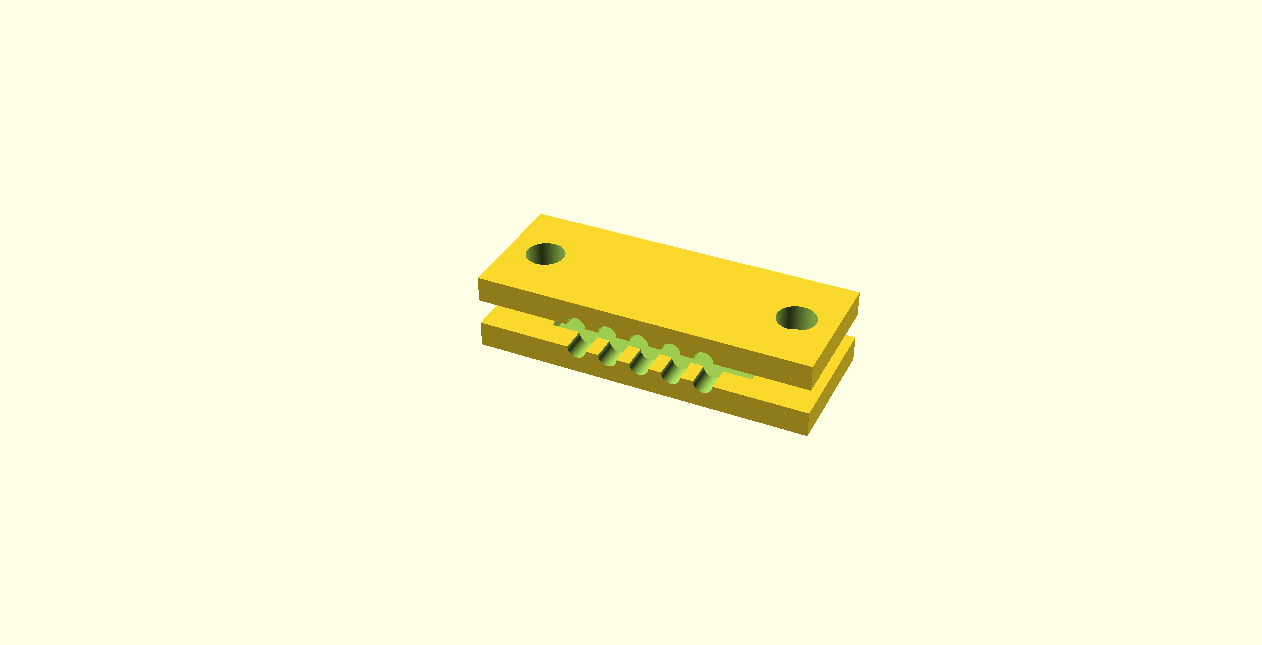
Protecció pel port sèrie (prog_protect.scad).
2.3.3. Propulsors¶
L’R2B2-nano està format per 4 propulsors que es componen de 3 parts: Carcassa del propulsor, carcassa del motor i hèlix.
La carcassa dels propulsors ens serveix per collar els motors al xassís i per evitar que l’hèlix pugui col·lisionar amb qualsevol objecte quan el motor està en marxa. Els principals paràmetres que cal tenir en compte son les mides del motor.
A continuació detallem quins paràmetres de la configuració afecten al propulsor:
/*
Title: config.scad for R2B2 Nano
*/
d_screw_p=3.4, //screw diameter
w_walls=2.7, //width of the walls
w_support=8 //screw support width
h_support=8, //screw support height
w_walls_m=1, //width of the motor encapsulation walls
d_motor_t=d_motor+(w_walls_m*2), //motor diameter
h_motor_sup=8, //motor support height
o_motor=0, //motor support distance from ground
d_thruster=34, //thruster diameter
h_thruster=30, //thruster height
| Paràmetre | Valor per defecte | Descripció |
|---|---|---|
| d_screw_h | 3 mm | Diàmetre de la tija del cargol on ha de collar |
| w_walls | 2.7 mm | Amplada de les parets |
| w_support | 8 mm | Amplada dels suports del propulsors |
| h_support | 8 mm | Profunditat dels suports del propulsors |
| w_walls_m | 1 mm | Parets de la carcassa del motor |
| d_motor_t | d_motor+(w_walls_m*2) mm | Diàmetre total del motor (motor + carcassa) |
| h_motor_sup | 8 mm | Alçada del cos del motor |
| o_motor | 0 mm | Offset del suport respecte la base del propulsor |
| d_thruster | 34 mm | Diàmetre del propulsor |
| h_thruster | 30 mm | Alçada del propulsor |
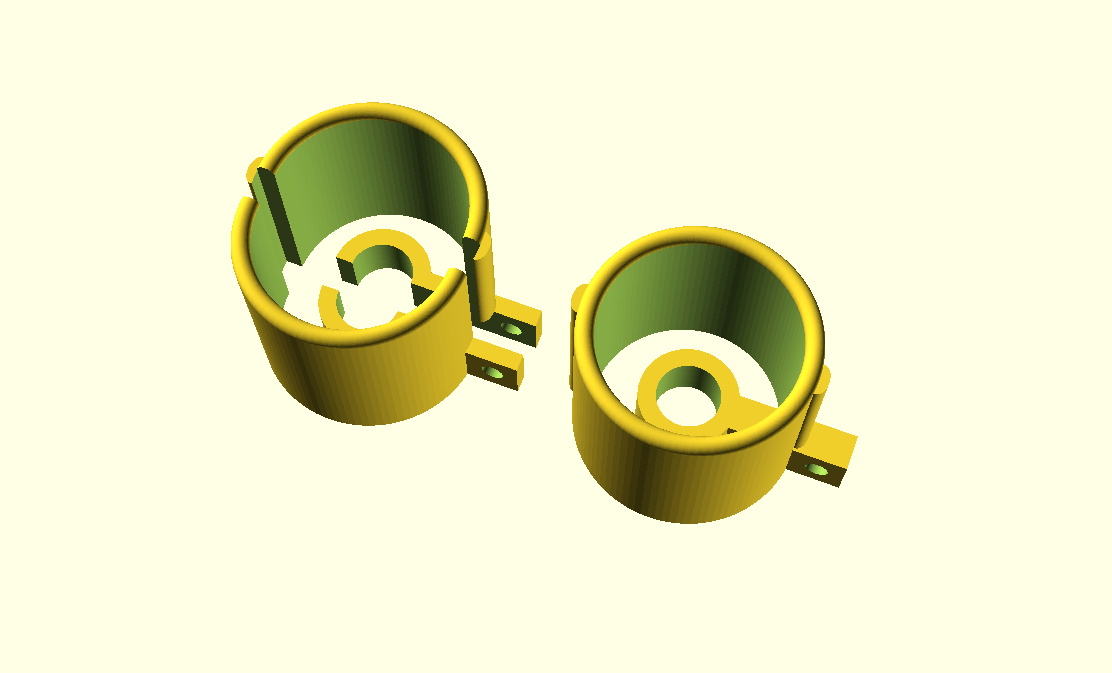
Propulsor (thruster.scad).
La carcassa del motor ens serveix per aïllar els motors de l’aigua. Els principals paràmetres que hem de tenir en compte son les mides dels motors que volem fer servir i l’amplada de les paret de la carcassa, que amb un valor petit ja serà suficient ja que no ha d’aguantar càrrega mecànica, tan sols aillar de l’aigua. Per l’amplada de l’eix del motor sempre va bé deixar una mica més de la mida real, sino a l’hora del muntatge haurem de repassar els forats amb un trepant. I per a l’alçada de la carcassa deixar un milimetres extres respecte a l’alçada del motor per tal de poder-hi posar la cola tèrmica.
/*
Title: config.scad for R2B2 Nano
*/
w_walls_m=1, //width of the walls
d_motor=7.6, //motor diameter
h_motor_body=22.6, //motor housing height
d_motor_shaft=1.5 //motor shaft diameter
| Paràmetre | Valor per defecte | Descripció |
|---|---|---|
| w_walls_m | 1 mm | Amplada de les parets de la carcassa |
| d_motor | 7.6 mm | Diàmetre del motor |
| h_motor_body | 22.6 mm | Alçada de l’encapsulat del motor |
| d_motor_shaft | 1.5 mm | Amplada de l’eix del motor |
Encapsulat del motor (motor_housing.scad).
En aquest objecte 3D s’ha tingut més en compte que s’ha de poder imprimir amb una impressora 3D que la seva eficiència. Per tant s’han fet unes hèlix no gaire primes i amb una forma molt recta per facilitar la impressió. No hi ha cap paràmetre destacable a part de escollir la quantitat d’aspes i la seva disposició ja que la majoria de paràmetres que l’afecten ja estan determinat per la mida del propulsor i del motor descrits anteriorment.
/*
Title: config.scad for R2B2 Nano
*/
w_walls=2.7, //width of the walls
d_thruster=34, //thruster diameter
h_propeller=10, //propeller height
o_propeller=1, //distance from propeller to walls of thruster
n_blade=3, //number of blades
s_blade=20, //angle separation between blades
w_blade=4, //width of the blades
rounded=false, //shape of the blades [round | trian | empty]
d_motor_shaft=1.5, //motor shaft diameter
d_motor_grub=2 //motor grub screw diameter
| Paràmetre | Valor per defecte | Descripció |
|---|---|---|
| w_walls | 2.7 mm | Amplada de les parets |
| d_thruster | 34 mm | Diàmetre del propulsor |
| h_propeller | 10 mm | Alçada del propulsor |
| o_propeller | 1 mm | Espai entre l’hèlix i les parets del propulsor |
| n_blade | 3 mm | Nombre d’aspes a l’hèlix |
| s_blade | 20 mm | Espai buit entre aspes en º |
| w_blade | 4 mm | Amplada de les parets de les aspes |
| rounded | false | Forma de les aspes [round | trian | empty] |
| d_motor_shaft | 1.5 mm | Amplada de l’eix del motor |
| d_motor_grub | 2 mm | Diàmetre del cargol sense cap per collar l’hèlix |
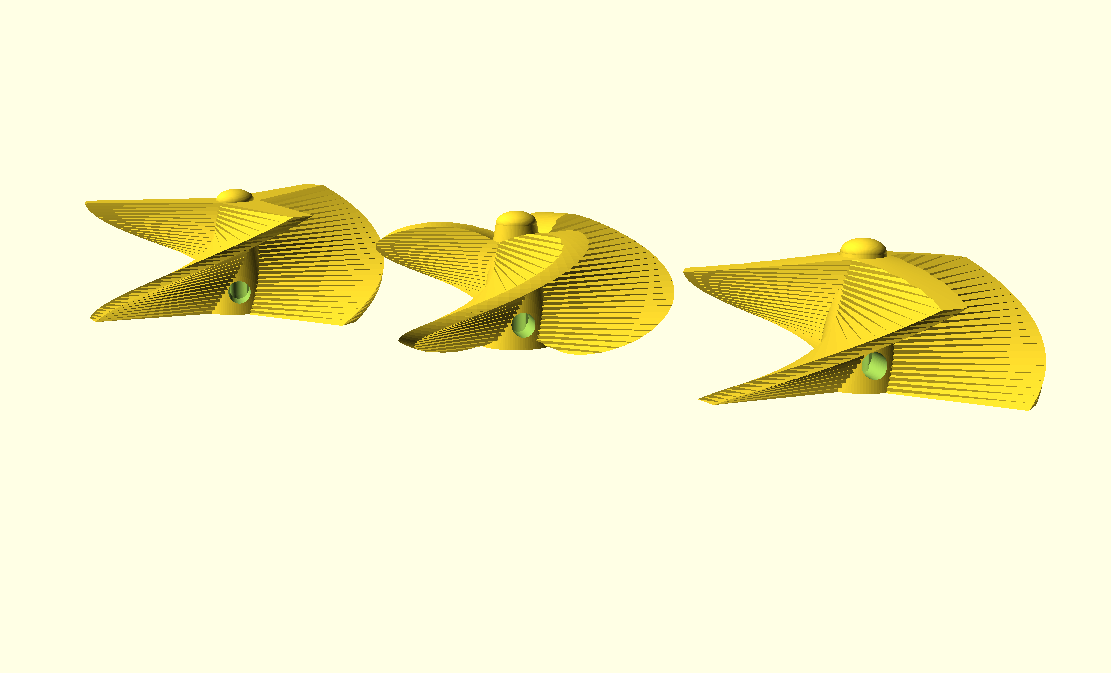
Hèlix (propeller.scad).
2.3.4. Boia¶
Una de les majors complicacion que es presenten en un ROV són les comunicacions, degut a que l’aigua no és un medi amic de les altes freqüències que utilitzen el Wifi o el Bluetooth. Per això es deu qué la majoria de ROVs duen un cable fins a la superfície, ja sigui per emetre les ones de comunicació com per connectar directament a la consola de control.
Com a paràmetres a la boia només hi ha les mides del cargols que utilitzarem per unir-ne les dues parts.
/*
Title: config.scad for R2B2 Nano
*/
d_screw_h=3, //screw hole diameter
d_screw_head=6.5 //screw head diameter
| Paràmetre | Valor per defecte | Descripció |
|---|---|---|
| d_screw_h | 3 mm | Diàmetre de la tija del cargol on ha de collar |
| d_screw_head | 6.5 mm | Diàmetre del cap del cargol |
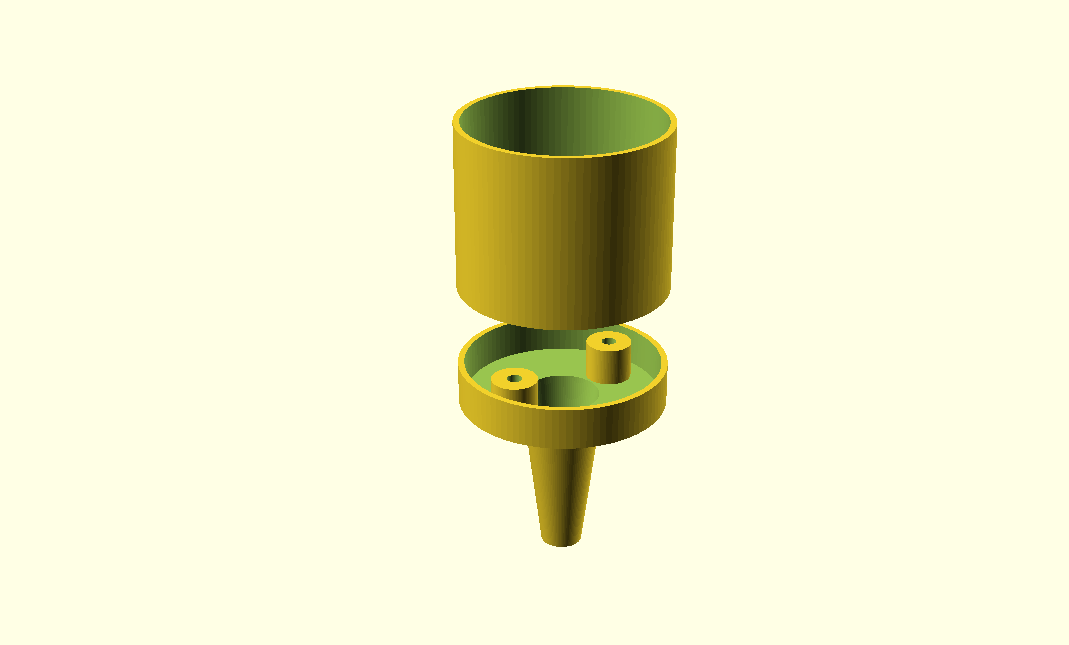
Boia (buoy.scad).
2.3.5. Carcassa¶
La carcassa NO ÉS IMPRIMIBLE en 3D!!! Està feta a mà amb espuma FOAM o alguna altra espuma que es pugui moldejar fàcilment amb un cúter, un trepant petit amb una fresa, llimes…
La seva funció principal és aconseguir la flotabilitat zero de l’R2B2-nano, és a dir que un cop col·loquen la carcassa a l’R2B2-nano i el submergim sota l’aigua ni s’enfonsi ni floti cap a la superfície.
Nota
Sempre va bé deixar una mica de flotabilitat positiva per que l’R2B2-nano vagi cap a la superficie en el cas de que ens quedem sense bateria o es produeix algun error de communicacions.
Per tant la carcassa de R2B2-nano es pot fer al gust i forma de cadascú tinguent en compte els principis d’Arquimedes. Si fem una forma de carcassa asimètrica, l’eix que es crea entre el punt de flotació i el punt de pes farà que l’R2B2-nano s’estabilitzi en una posició incòmode i de més difícil controlar.
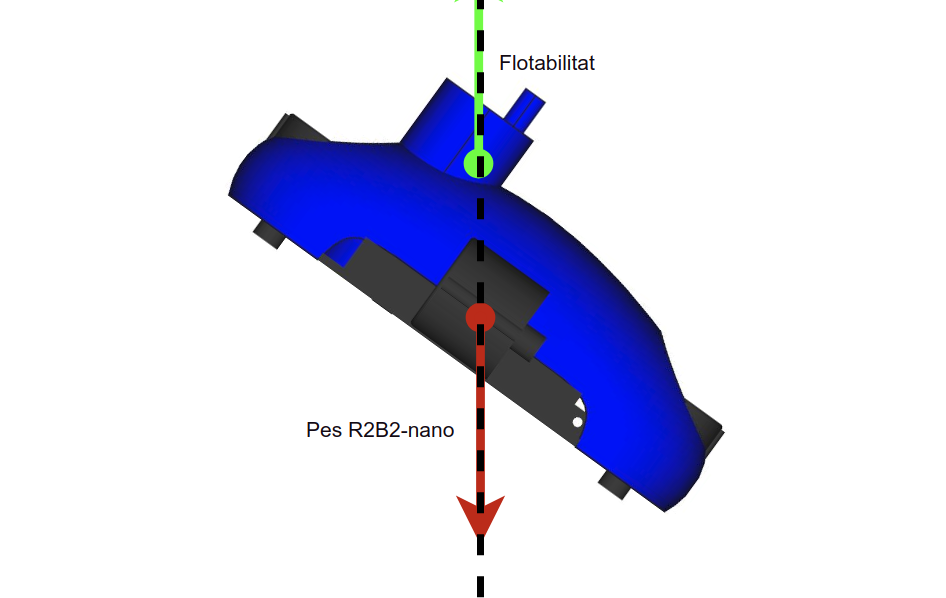
Disseny mala carcassa.
Per altra banda si aconseguim alinear tan la flotació com el pes de l’R2B2-nano en una posició on ens queden tots els propulsors a la mateixa alçada, tindrem un R2B2-nano molt més estable i fàcil de controlar.
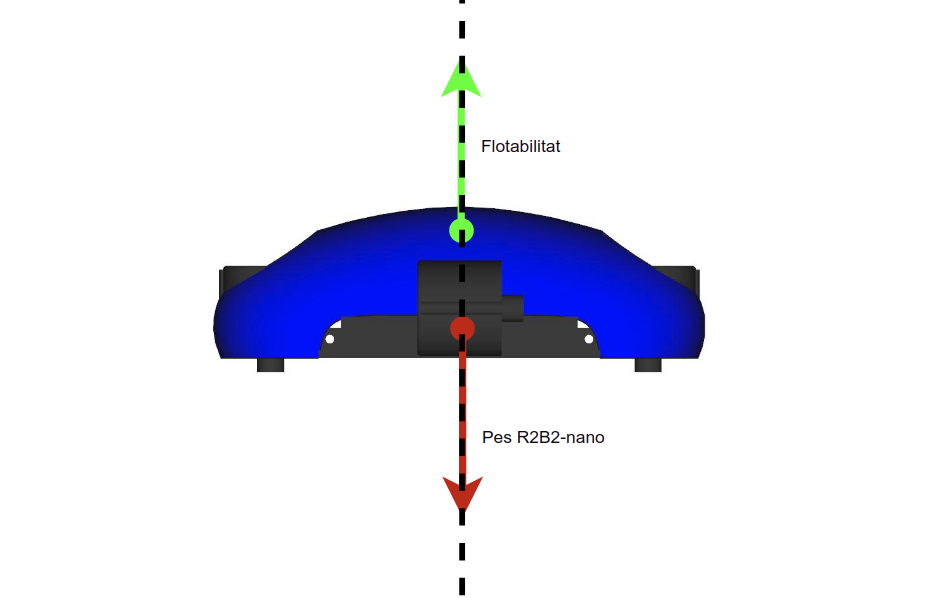
Disseny carcassa correcte.
Una proposta de carcassa podria ser com la mostrada a continuació:
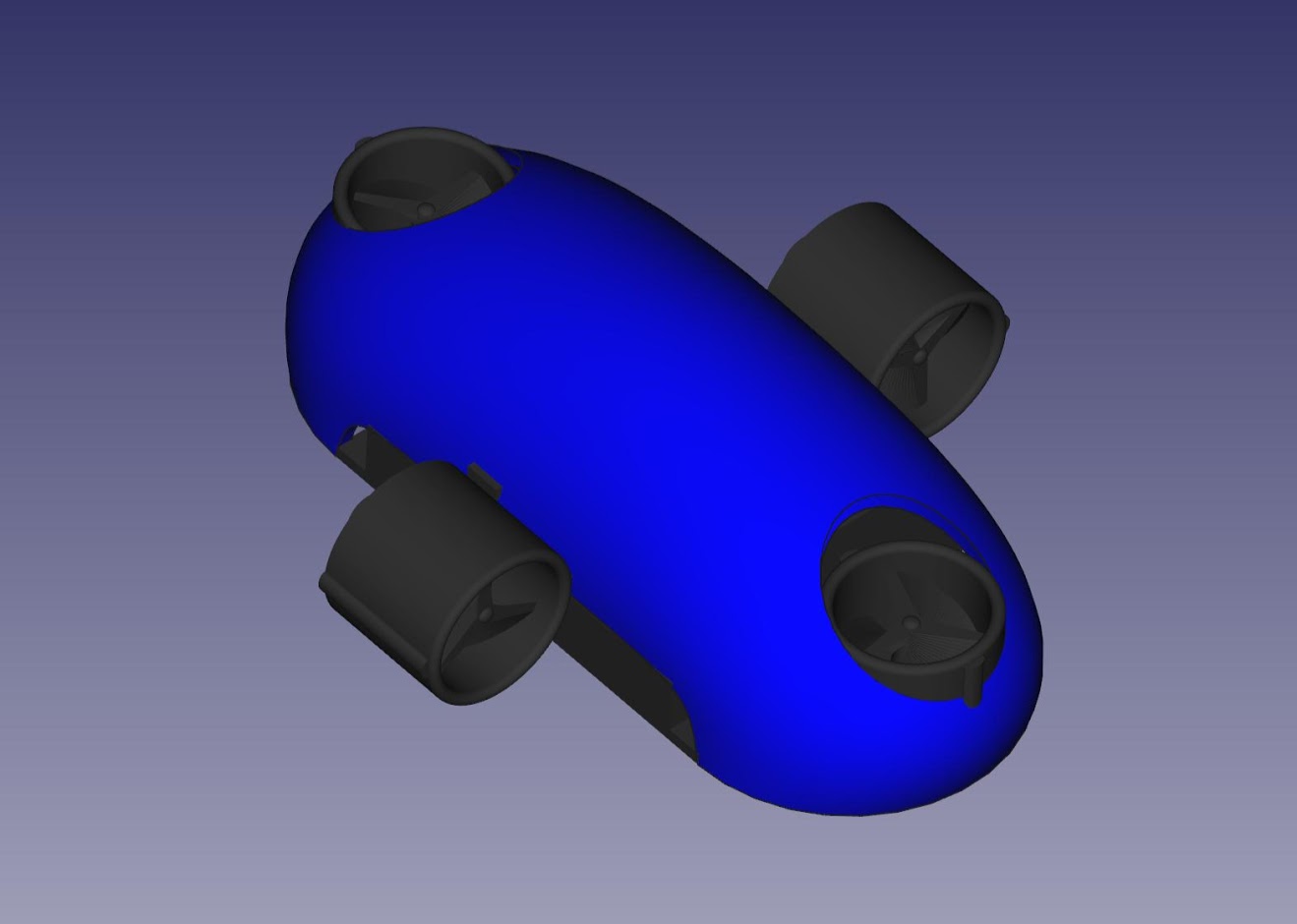
Proposta de carcassa.
2.4. Generar STL¶
Per poder imprimir les peces en una impressora 3D convencional cal que els fitxers estiguin en un format compatible com pot ser STL. Des de l’OpenSCAD podem generar els fitxers STL un a un, però per agilitzar aquesta tasca hi ha un Script dins la carpeta design que recorre el contingut de la carpeta /to_stl i converteix cada fitxer .scad que hi troba a un STL. Els STLs generats es desen a la carpeta /stl.
Atenció
Generar tots el fitxers pot requerir una espera llarga.
r2b2@r2b2os:/r2b2-nano/design$ ./generate_stl.sh
Converting base_b.scad to base_b.stl
Converting base.scad to base.stl
Converting buoy_down.scad to buoy_down.stl
Converting buoy_top.scad to buoy_top.stl
Converting chassis_b.scad to chassis_b.stl
Converting chassis.scad to chassis.stl
Converting half_thruster_A.scad to half_thruster_A.stl
Converting half_thruster_B.scad to half_thruster_B.stl
Converting motor_housing.scad to motor_housing.stl
Converting prog_protec.scad to prog_protec.stl
Converting propeller.scad to propeller.stl
Converting r2b2_nano.scad to r2b2_nano.stl
Per altra banda, si nomes ens ens interessa regenerar l’STL d’una sola peça, podem cridar l’script passant com a paràmetre el nom .scad del fitxer que volem convertir.
r2b2@r2b2os:/r2b2-nano/design$ ./generate_stl.sh to_stl/propeller.scad